

Hier kommen Systeme zum Einsatz, welche passiv (motorisch betrieben) den Patienten unterstützen, seine dysfunktionalen Bewegungen durchzuführen. Bei schwerst betroffenen Patienten ohne momentan feststellbare Eigenfunktion können die Systeme i.d.R. im CPM-Modus (Continious Passive Motion) eingesetzt werden. Sobald erkennbare, aktive Funktionen messbar sind (Bewegung, Muskelaktivität, werden diese in einer Aufgabe gestellt. Nach Erreichen des aktiven Potentials führt die Robotik die fehlende Bewegung assistiv weiter. Auf dem Markt befinden sich Systeme für die unteren Extremitäten (Gangroboter) als Exsoskelett oder als Endeffektor-System: Für die oberen Extremitäten gibt es Systeme für Schulter-Arm-Hand-Training. Teilweise werden die Systeme mit einer Gewichtsentlastung gekoppelt
Einsatzbereiche
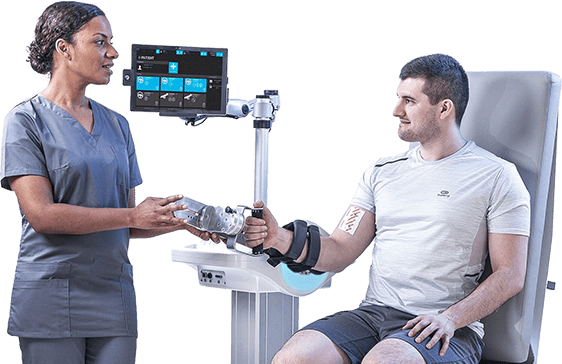
Robotik-Therapie
Solche Trainingssysteme werden vor allem bei Patienten mit schweren Dysfunktionen des Bewegungsapparates eingesetzt, bei denen ein konventionelles Training (z.B. MTT) aufgrund nicht vorhandenem Bewegungsausmaß und/oder Kraft nicht durchführbar ist. Dies ist insbesondere bei neurologischen Erkrankungen der Fall.

Worin liegt der Vorteil dieser Systeme?
Eine möglichst hohe Repetition von bewegungsanbahnenden Übungen ist insbesondere in der neurologischen Therapie einer der essentiellen Bausteine für Erfolg. Robotik-Training ermöglicht hohe Wiederholungszahlen bei gleichzeitiger personeller Entlastung. Die Balance von aktiven und passivem Bewegungstraining kann zielgenau ermittelt werden. Anhand der Messdaten kann der Behandlungsverlauf objektiv aufgezeigt werden. Bei Systemen, welche Biofeedback und Robotik kombinieren, kann durch motivierende Aufgabenspiele der outcome zusätzlich erhöht werden.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}